Linha de embalagem de caixas com servo coordenadas (com divisória de papelão)

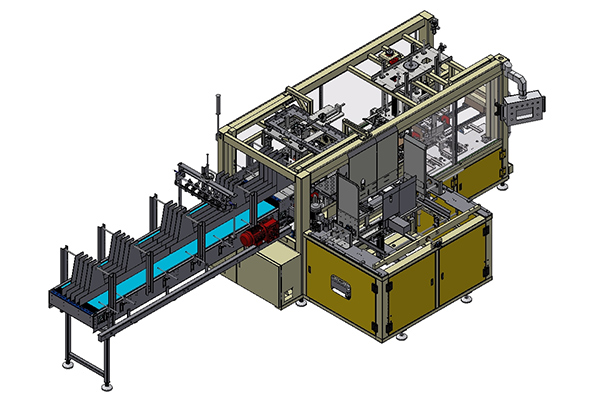
A linha de produção de embalagens consiste em um divisor de alta velocidade, uma linha de transporte de produtos, uma linha de transporte com pinça, um robô Hbot, um mecanismo de movimentação de eixo duplo, uma linha de transporte de caixas, um mecanismo de detecção, uma pinça para divisórias de papelão, um sistema de alimentação de divisórias de papelão, um servocontrolador, uma pinça para garrafas e uma cerca de proteção. O divisor de alta velocidade divide os produtos em várias pistas, enquanto o mecanismo de movimentação de eixo duplo acelera a passagem dos produtos. Após a chegada do produto à estação de divisórias de papelão, o robô Scar carrega as divisórias de papelão sobre os produtos já organizados. Os produtos chegam à esteira de triagem. Em seguida, os produtos são selecionados pela pinça e colocados na caixa de papelão, e a esteira de caixas transporta a caixa contendo o produto para fora da linha.
Layout completo do sistema de embalagem

Configuração principal
| Braço robótico | ABB/KUKA/Fanuc |
| Motor | SEW/Nord/ABB |
| Servomotor | Siemens/Panasonic |
| VFD | Danfoss |
| sensor fotoelétrico | DOENTE |
| Tela sensível ao toque | Siemens |
| Aparelhos de baixa tensão | Schneider |
| terminal | Fênix |
| Pneumático | FESTO/SMC |
| Disco de sucção | PIAB |
| Consequência | KF/NSK |
| Bomba de vácuo | PIAB |
| PLC | Siemens/Schneider |
| HMI | Siemens/Schneider |
| Placa de corrente/corrente | Intralox/Rexnord/Regina |
Descrição da estrutura principal




Mais vídeos mostram
- Encaixotadora servo-coordenada para garrafas de vidro com divisória de papelão