Sistema integrado de robô Delta
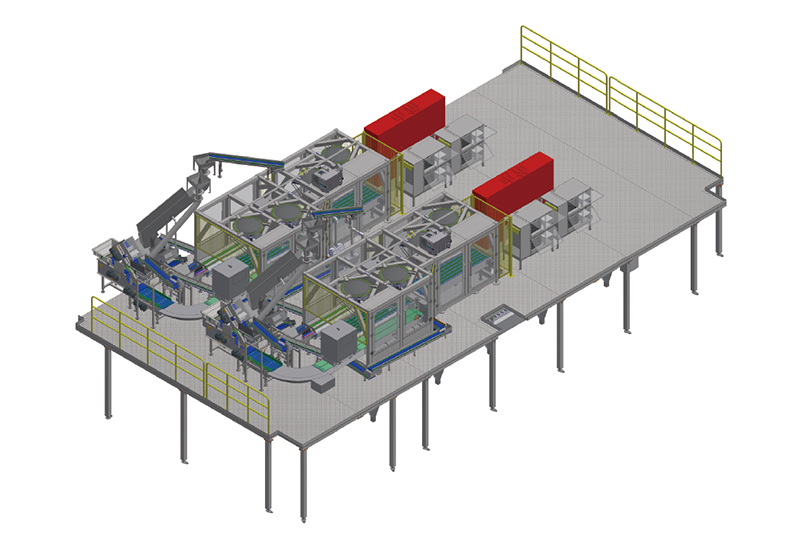
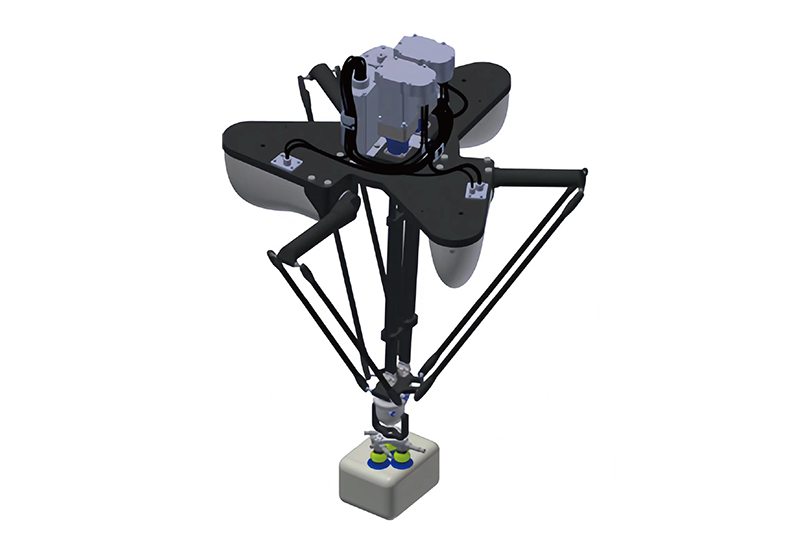
Os produtos embalados internamente, fora de ordem, são descarregados do armazenamento. Após serem separados pelo desembaralhador servo e a posição do produto ser reconhecida pelo sistema de visão, durante a encaixotamento na máquina, o sistema de visão compartilha as informações com o robô aranha, que pega e coloca os produtos na embalagem externa correspondente.
Aplicativo
Ideal para separar, identificar e selecionar produtos de embalagens internas desordenadas, como garrafas, copos, barris e sacos, tais como chá de leite em pó, macarrão de arroz, macarrão instantâneo, etc., e colocá-los dentro da embalagem externa.
Desenho 3D


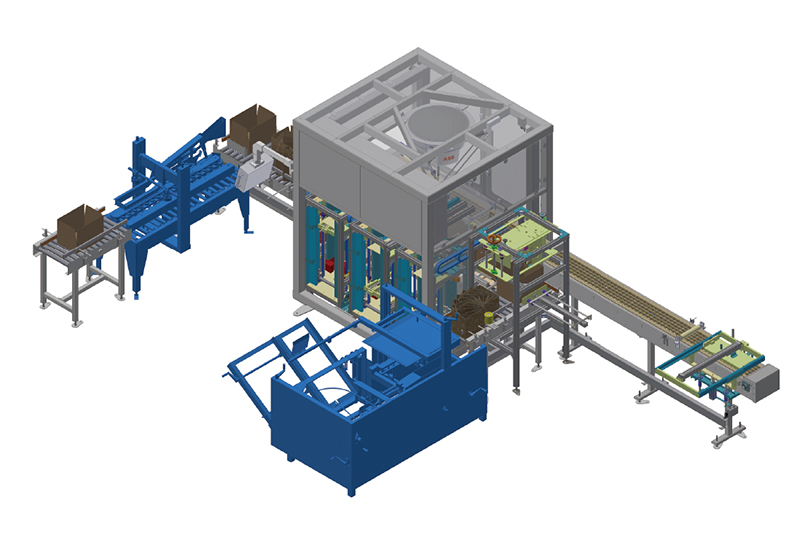
Linha de embalagem
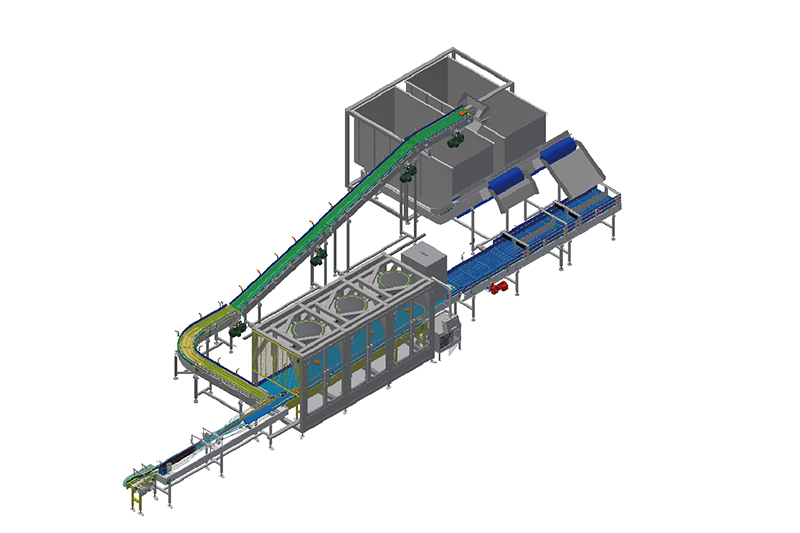
Linha de desembaralhador

Configuração elétrica
| PLC | Siemens |
| VFD | Danfoss |
| Servomotor | Elau-Siemens |
| sensor fotoelétrico | DOENTE |
| Componentes pneumáticos | SMC |
| Tela sensível ao toque | Siemens |
| Aparelhos de baixa tensão | Schneider |
| terminal | Fênix |
| Motor | COSTURAR |
Parâmetro técnico
| Modelo | LI-RUM200 |
| Velocidade estável | 200 peças/min |
| Fonte de energia | 380 AC ±10%, 50HZ, 3PH+N+PE. |
Mais vídeos mostram
- Linha de triagem, alimentação, desembaralhamento e embalagem de caixas com robôs Delta.






